Лекция 3. Плоскопараллельное движение
твердого тела. Определение скоростей и ускорений.
В данной лекции
рассматриваются следующие вопросы:
1.
Плоскопараллельное движение твердого тела.
2. Уравнения плоскопараллельного
движения.
3. Разложение
движения на поступательное и вращательное.
4. Определение
скоростей точек плоской фигуры.
5. Теорема о
проекциях скоростей двух точек тела.
6. Определение
скоростей точек плоской фигуры с помощью мгновенного центра скоростей.
7. Решение задач
на определение скорости.
8. План
скоростей.
9. Определение
ускорений точек плоской фигуры.
10. Решение
задач на ускорения.
11. Мгновенный
центр ускорений.
Изучение данных вопросов необходимо в дальнейшем для
динамики плоского движения твердого тела, динамики относительного движения
материальной точки, для решения задач в дисциплинах «Теория машин и механизмов»
и «Детали машин».
Плоскопараллельное
движение твердого тела. Уравнения плоскопараллельного движения.
Разложение
движения на поступательное и вращательное
Плоскопараллельным (или плоским) называется такое
движение твердого тела, при, котором все его точки перемещаются параллельно
некоторой фиксированной плоскости П (рис. 1). Плоское движение совершают многие части механизмов
и машин, например катящееся колесо на прямолинейном участке пути, шатун в
кривошипно-ползунном механизме и др. Частным случаем плоскопараллельного
движения является вращательное движение твердого тела вокруг неподвижной оси.
Рис.1 Рис.2
Рассмотрим сечение S тела какой-нибудь плоскости Оxy, параллельной плоскости П (рис.2). При плоскопараллельном
движении все точки тела, лежащие на прямой ММ’,
перпендикулярной течению S, т. е. плоскости П, движутся тождественно.
Отсюда заключаем, что для изучения движения всего тела
достаточно изучить, как движется в плоскости Оху сечение S этого тела
или некоторая плоская фигура S. Поэтому в
дальнейшем вместо плоского движения тела будем рассматривать движение плоской
фигуры S в ее плоскости, т.е. в плоскости Оху.
Положение фигуры S в плоскости Оху
определяется положением какого-нибудь проведенного на этой фигуре отрезка АВ (рис.1). В свою очередь положение
отрезка АВ можно определить, зная
координаты xA и yA точки А и угол  , который отрезок АВ
образует с осью х. Точку А, выбранную для определения положения
фигуры S, будем в дальнейшем называть
полюсом.
, который отрезок АВ
образует с осью х. Точку А, выбранную для определения положения
фигуры S, будем в дальнейшем называть
полюсом.
При движении фигуры величины xA и yA и будут
изменяться. Чтобы знать закон движения, т. е. положение фигуры в плоскости Оху в любой момент времени, надо знать
зависимости

Уравнения,
определяющие закон происходящего движения, называются уравнениями движения
плоской фигуры в ее плоскости. Они же являются уравнениями плоскопараллельного
движения твердого тела.
Первые два из уравнений
движения определяют то движение, которое
фигура совершала бы при =const; это, очевидно, будет поступательное движение, при
котором все точки фигуры движутся так же, как полюс А. Третье уравнение
определяет движение, которое фигура совершала бы при  и
и  , т.е. когда полюс А неподвижен; это будет вращение фигуры вокруг полюса А. Отсюда можно заключить, что в общем
случае движение плоской фигуры в ее плоскости может рассматриваться как
слагающееся из поступательного движения, при котором все точки фигуры движутся
так же, как полюс А, и из
вращательного движения вокруг этого полюса.
, т.е. когда полюс А неподвижен; это будет вращение фигуры вокруг полюса А. Отсюда можно заключить, что в общем
случае движение плоской фигуры в ее плоскости может рассматриваться как
слагающееся из поступательного движения, при котором все точки фигуры движутся
так же, как полюс А, и из
вращательного движения вокруг этого полюса.
Основными кинематическими характеристиками
рассматриваемого движения являются скорость и ускорение поступательного
движения, равные скорости и ускорению полюса  , а также угловая скорость
, а также угловая скорость  и угловое
ускорение
и угловое
ускорение  вращательного
движения вокруг полюса.
вращательного
движения вокруг полюса.
Определение
скоростей точек плоской фигуры
Было отмечено, что движение плоской фигуры можно рассматривать
как слагающееся из поступательного движения, при котором все точки фигуры
движутся со скоростью  полюса А, и из
вращательного движения вокруг этого полюса. Покажем, что скорость любой точки М фигуры складывается геометрически из скоростей, которые точка получает в каждом
из этих движений.
полюса А, и из
вращательного движения вокруг этого полюса. Покажем, что скорость любой точки М фигуры складывается геометрически из скоростей, которые точка получает в каждом
из этих движений.
В самом деле, положение любой точки М фигуры определяется по отношению к
осям Оху радиусом-вектором  (рис.3), где
(рис.3), где  - радиус-вектор полюса А,
- радиус-вектор полюса А,  - вектор, определяющий положение точки М
относительно осей
- вектор, определяющий положение точки М
относительно осей  , перемещающихся вместе с полюсом А поступательно (движение фигуры по
отношению к этим осям представляет собой вращение вокруг полюса А). Тогда
, перемещающихся вместе с полюсом А поступательно (движение фигуры по
отношению к этим осям представляет собой вращение вокруг полюса А). Тогда
В полученном равенстве величина  есть скорость
полюса А;
величина же
есть скорость
полюса А;
величина же  равна скорости
равна скорости  , которую точка М
получает при
, которую точка М
получает при  , т.е. относительно осей
, т.е. относительно осей  , или, иначе говоря, при вращении фигуры вокруг полюса
А. Таким образом, из предыдущего
равенства действительно следует, что
, или, иначе говоря, при вращении фигуры вокруг полюса
А. Таким образом, из предыдущего
равенства действительно следует, что
 .
.
Скорость , которую точка М
получает при вращении фигуры вокруг полюса А:
 ,
,
где ω - угловая
скорость фигуры.
Таким образом, скорость любой точки М плоской фигуры геометрически складывается
из скорости какой-нибудь другой точки А, принятой за полюс, и скорости, которую точка М получает при вращении фигуры вокруг
этого полюса. Модуль и направление скорости  находятся
построением соответствующего параллелограмма (рис.4).
находятся
построением соответствующего параллелограмма (рис.4).
Рис.3 Рис.4
Теорема о проекциях
скоростей двух точек тела
Определение скоростей точек плоской фигуры (или тела,
движущегося плоскопараллельно) связано обычно с довольно сложными расчетами.
Однако можно получить ряд других, практически более удобных и простых методов
определения скоростей точек фигуры (или тела).
Рис.5
Один из таких методов дает теорема: проекции
скоростей двух точек твердого тела на ось, проходящую через эти точки, равны
друг другу. Рассмотрим какие-нибудь две точки А и В плоской фигуры (или тела). Принимая точку А за полюс (рис.5), получаем  . Отсюда, проектируя обе части равенства на ось,
направленную по АВ, и учитывая, что
вектор
. Отсюда, проектируя обе части равенства на ось,
направленную по АВ, и учитывая, что
вектор  перпендикулярен
АВ, находим
перпендикулярен
АВ, находим

и теорема доказана.
Определение
скоростей точек плоской фигуры с помощью мгновенного центра скоростей.
Другой простой и наглядный метод определения скоростей
точек плоской фигуры (или тела при плоском движении) основан на понятии о
мгновенном центре скоростей.
Мгновенным центром
скоростей называется точка плоской фигуры, скорость которой в данный
момент времени равна нулю.
Легко
убедиться, что если фигура движется непоступательно,
то такая точка в каждый момент времени t существует
и притом единственная. Пусть в момент времени t точки А
и В плоской фигуры имеют скорости  и
и  , не параллельные друг другу (рис.6). Тогда точка Р, лежащая на
пересечении перпендикуляров Аа к вектору и Вb к вектору , и будет мгновенным центром скоростей так как
, не параллельные друг другу (рис.6). Тогда точка Р, лежащая на
пересечении перпендикуляров Аа к вектору и Вb к вектору , и будет мгновенным центром скоростей так как  . В самом деле,
если допустить, что , то по теореме о проекциях скоростей вектор
. В самом деле,
если допустить, что , то по теореме о проекциях скоростей вектор  должен быть
одновременно перпендикулярен и АР
(так как
должен быть
одновременно перпендикулярен и АР
(так как  ) и ВР (так
как
) и ВР (так
как  ), что невозможно. Из той же теоремы видно, что
никакая другая точка фигуры в этот момент времени не может иметь скорость,
равную нулю.
), что невозможно. Из той же теоремы видно, что
никакая другая точка фигуры в этот момент времени не может иметь скорость,
равную нулю.
Рис.6
Если теперь в момент времени  взять точку Р за полюс, то скорость точки А будет
взять точку Р за полюс, то скорость точки А будет

так как . Аналогичный результат получается для любой другой
точки фигуры. Следовательно, скорости точек плоской фигуры определяются в данный момент времени так, как
если бы движение фигуры было вращением вокруг мгновенного центра скоростей. При
этом


Из равенств, следует еще, что  точек плоской фигуры пропорциональны их
расстояниям от МЦС.
точек плоской фигуры пропорциональны их
расстояниям от МЦС.
Полученные результаты приводят к следующим выводам.
1. Для определения мгновенного центра скоростей надо
знать только направления скоростей и каких-нибудь
двух точек А
и В плоской фигуры (или траектории
этих точек); мгновенный центр скоростей находится в точке пересечения
перпендикуляров, восставленных из точек А
и В к скоростям этих точек (или к
касательным к траекториям).
2. Для определения скорости любой точки плоской
фигуры, надо знать модуль и направление скорости какой-нибудь одной точки А фигуры и направление скорости другой
ее точки В. Тогда, восставив из
точек А и В перпендикуляры к и , построим мгновенный центр скоростей Р и по направлению
определим
направление поворота фигуры. После этого, зная , найдем скорость  любой
точки М плоской фигуры. Направлен вектор
перпендикулярно РМ в сторону поворота фигуры.
любой
точки М плоской фигуры. Направлен вектор
перпендикулярно РМ в сторону поворота фигуры.
3. Угловая скорость плоской фигуры
равна в каждый данный момент времени отношению скорости какой-нибудь точки
фигуры к ее расстоянию от мгновенного центра скоростей Р:

Рассмотрим некоторые частные случаи определения
мгновенного центра скоростей.
а) Если плоскопараллельное движение осуществляется
путем качения без скольжения одного цилиндрического тела по поверхности
другого неподвижного, то точка Р катящегося тела,
касающаяся неподвижной поверхности (рис.7), имеет в данный момент времени
вследствие отсутствия скольжения скорость, равную нулю (), и, следовательно, является мгновенным центром
скоростей. Примером служит качение колеса по рельсу.
б) Если скорости точек А и В плоской фигуры параллельны друг другу, причем линия АВ не перпендикулярна (рис.8,а), то
мгновенный центр скоростей лежит в бесконечности и скорости всех точек
параллельны . При этом из теоремы о проекциях скоростей следует,
что  т. е.
т. е.  ; аналогичный результат получается для всех других
точек. Следовательно, в рассматриваемом случае скорости всех точек фигуры в
данный момент времени равны друг другу и по модулю, и по направлению, т.е.
фигура имеет мгновенное поступательное распределение скоростей (такое состояние
движения тела называют еще мгновенно поступательным). Угловая скорость тела в этот
момент времени, как видно равна нулю.
; аналогичный результат получается для всех других
точек. Следовательно, в рассматриваемом случае скорости всех точек фигуры в
данный момент времени равны друг другу и по модулю, и по направлению, т.е.
фигура имеет мгновенное поступательное распределение скоростей (такое состояние
движения тела называют еще мгновенно поступательным). Угловая скорость тела в этот
момент времени, как видно равна нулю.
Рис.7
Рис.8
в) Если скорости точек А и В плоской фигуры
параллельны друг другу и при этом линия АВ
перпендикулярна , то мгновенный центр скоростей Р определяется построением, показанным
на рис.8,б. Справедливость построений следует из пропорции. В этом случае, в
отличие от предыдущих, для нахождения центра Р
надо кроме направлений знать еще и модули скоростей  .
.
г) Если известны вектор скорости какой-нибудь
точки В фигуры и ее угловая скорость, то положение мгновенного центра скоростей Р, лежащего на
перпендикуляре к (рис.8,б),
можно найти как  .
.
Решение задач на определение скорости.
Для определения искомых кинематических характеристик
(угловой скорости тела или скоростей его точек) надо знать модуль и направление
скорости какой-нибудь одной точки и направление скорости другой точки сечения
этого тела. С определения этих характеристик по данным задачи и следует начинать решение.
Механизм,
движение которого исследуется, надо изображать на чертеже в том положении, для
которого требуется определить соответствующие характеристики. При расчете
следует помнить, что понятие о мгновенном центре скоростей имеет место для
данного твердого тела. В механизме, состоящем из нескольких тел, каждое
непоступательное движущееся тело имеет в данный момент времени свой мгновенный
центр скоростей Р
и свою угловую скорость.
Пример 1. Тело, имеющее
форму катушки, катится своим
средним цилиндром по неподвижной плоскости так, что  (см). Радиусы
цилиндров: R = 4 см и r = 2 см (рис.9).
.
(см). Радиусы
цилиндров: R = 4 см и r = 2 см (рис.9).
.
Рис.9
Решение. Определим
скорости точек А,В и С.
Мгновенный
центр скоростей находится в точке касания катушки с плоскостью.
Скорость полюса
С .

Угловая скорость катушки

Скорости точек А и В
направлены перпендикулярно отрезкам прямых, соединяющих эти точки с
мгновенным центром скоростей. Величина скоростей:


Пример
2. Колесо радиуса R = 0,6
м катится без скольжения по прямолинейному участку пути (рис.9.1);
скорость его центра С постоянна и равна vc= 12 м/с. Найти угловую скорость колеса и скорости
концов М1, М2, M3, М4
вертикального и горизонтального диаметров колеса.
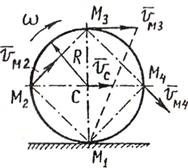
Рис.9.1
Решение.
Колесо совершает плоскопараллельное движение. Мгновенный центр скоростей
колеса находится в точке М1 контакта с горизонтальной
плоскостью, т. е.

Угловая
скорость колеса

Находим
скорости точек М2, M3 и М4




Пример
3. Ведущее колесо автомобиля радиуса R = 0,5
м катится со скольжением (с буксованием) по
прямолинейному участку шоссе; скорость его центра С постоянна и равна vc = 4 м/с. Мгновенный центр скоростей колеса находится в
точке Р на
расстоянии h = 0,3
м от плоскости качения. Найти угловую скорость колеса и
скорости точек А и В его вертикального
диаметра.
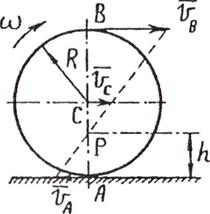
Рис.9.2
Решение.
Угловая скорость колеса

Находим
скорости точек А
и В



Пример
4. Найти угловую скорость шатуна
АВ и скорости точек В и С кривошипно-шатунного
механизма (рис.9.3,а). Дана угловая
скорость кривошипа OA и
размеры: ωОА
= 2 с-1, OA = АВ =
0,36 м,
АС= 0,18 м.
а)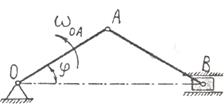 б)
б)
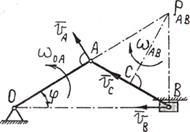
Рис.9.3
Решение. Кривошип OA совершает вращательное движение, шатун АВ - плоскопараллельное движение (рис.9.3,б).
Находим скорость точки
А звена OA

Скорость точки В
направлена по горизонтали. Зная направление скоростей точек
А и В шатуна АВ, определяем положение его мгновенного
центра скоростей - точку РАВ.
Угловая скорость звена АВ и
скорости точек В и С:


Пример 5. Стержень АВ скользит
концами по взаимно перпендикулярным прямым так, что при угле  скорость
скорость  (рис.10). Длина
стержня AB=l. Определим скорость конца А и угловую скорость стержня.
(рис.10). Длина
стержня AB=l. Определим скорость конца А и угловую скорость стержня.
Рис.10
Решение. Нетрудно определить направление вектора скорости
точки А, скользящей по вертикальной прямой. Тогда  находится на
пересечении перпендикуляров к
находится на
пересечении перпендикуляров к  и
и  (рис. 10).
(рис. 10).
Угловая скорость
Скорость точки А:

А скорость центра стержня С, например, направлена
перпендикулярно  и равна:
и равна:

План скоростей.
Пусть известны скорости нескольких точек плоского
сечения тела (рис.11). Если эти скорости отложить в масштабе из некоторой точки О и
соединить их концы
прямыми, то получится картинка,
которая называется планом
скоростей. (На рисунке  ).
).
Рис.11
Свойства плана
скоростей.
а) Стороны треугольников на плане скоростей
перпендикулярны соответствующим прямым на плоскости тела.
Действительно,  . Но на плане скоростей
. Но на плане скоростей  . Значит
. Значит  причём
причём  перпендикулярна АВ, поэтому и
перпендикулярна АВ, поэтому и  . Точно так же
. Точно так же  и
и  .
.
б) Стороны плана скоростей пропорциональны соответствующим отрезкам
прямых на плоскости тела.
Так
как  , то отсюда и следует, что стороны плана скоростей пропорциональны отрезкам
прямых на плоскости тела.
, то отсюда и следует, что стороны плана скоростей пропорциональны отрезкам
прямых на плоскости тела.
Объединив
оба свойства, можно
сделать вывод, что план скоростей
подобен соответствующей фигуре
на теле и повёрнут относительно
её на 90˚ по направлению вращения.
Эти свойства плана скоростей позволяют определять скорости
точек тела графическим способом.
Пример 6. На рис.12
в масштабе изображён
механизм. Известна угловая скорость  звена ОА.
звена ОА.
Рис.12
Решение. Чтобы построить план скоростей должна
быть известна скорость какой-нибудь
одной точки и хотя
бы направление вектора скорости другой. В нашем примере можно
определить скорость точки А:
 и
направление её вектора .
и
направление её вектора .
Рис.13
Откладываем (рис.13) из точки о в масштабе  Известно
направление вектора скорости
ползуна В – горизонтальное. Проводим на
плане скоростей из точки О прямую I по направлению
скорости , на которой
должна находиться точка b,
определяющая скорость этой точки В.
Так как
стороны плана скоростей перпендикулярны соответствующим
звеньям механизма, то
из точки а проводим
прямую перпендикулярно АВ до
пересечения с прямой I. Точка пересечения определит точку b, а значит
и скорость точки В:
Известно
направление вектора скорости
ползуна В – горизонтальное. Проводим на
плане скоростей из точки О прямую I по направлению
скорости , на которой
должна находиться точка b,
определяющая скорость этой точки В.
Так как
стороны плана скоростей перпендикулярны соответствующим
звеньям механизма, то
из точки а проводим
прямую перпендикулярно АВ до
пересечения с прямой I. Точка пересечения определит точку b, а значит
и скорость точки В:
 . По второму свойству плана скоростей его стороны
подобны звеньям механизма. Точка С делит АВ пополам, значит и с должна делить аb пополам. Точка с определит на плане скоростей величину и направление скорости
. По второму свойству плана скоростей его стороны
подобны звеньям механизма. Точка С делит АВ пополам, значит и с должна делить аb пополам. Точка с определит на плане скоростей величину и направление скорости  (если с
соединить с точкой О).
(если с
соединить с точкой О).
Скорость точки Е равна нулю, поэтому
точка е на плане
скоростей совпадает с точкой О.
Далее.
Должно быть
 и
и  . Проводим эти прямые, находим их
точку пересечения d. Отрезок оd определит вектор
скорости
. Проводим эти прямые, находим их
точку пересечения d. Отрезок оd определит вектор
скорости  .
.
Пример
7. В шарнирном четырехзвеннике ОАВС ведущий кривошип OA см равномерно вращается вокруг оси
О с угловой скоростью ω
= 4 с-1 и при помощи шатуна АВ = 20 см приводит во
вращательное движение кривошип ВС вокруг оси С (рис.13.1,а).
Определить скорости точек А и В, а также угловые скорости шатуна
АВ и кривошипа ВС.
а)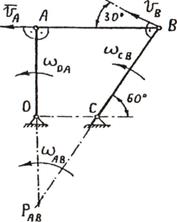 б)
б)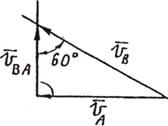
Рис.13.1
Решение.
Скорость точки А
кривошипа OA

Взяв точку А
за полюс, составим векторное уравнение

где

Графическое
решение этого уравнения дано на рис.13.1,б
(план скоростей).
С
помощью плана скоростей получаем


Угловая
скорость шатуна АВ
Скорость
точки В можно найти с помощью теоремы о
проекциях скоростей двух точек тела на соединяющую их прямую

В заключение найдем скорость точки В с помощью мгновенного центра скоростей РAB шатуна
АВ. Зная направления скоростей точек А и В  находим положение точки PAB.
находим положение точки PAB.
Угловая скорость шатуна АВ

Скорость точки В
и угловая скорость кривошипа СВ


Определение ускорений точек плоской
фигуры
Покажем, что ускорение любой точки М плоской фигуры (так же, как и скорость) складывается из
ускорений, которые точка получает при поступательном и вращательном движениях этой
фигуры. Положение точки М по
отношению к осям Оxy (см.рис.30) определяется радиусом-вектором
где . Тогда
В правой части этого равенства первое слагаемое есть
ускорение  полюса А, а второе
слагаемое определяет ускорение
полюса А, а второе
слагаемое определяет ускорение  , которое
точка м получает при вращении фигуры вокруг полюса A. следовательно,
, которое
точка м получает при вращении фигуры вокруг полюса A. следовательно,
 .
.
Значение , как ускорения точки вращающегося твердого тела,
определяется как

где и - угловая
скорость и угловое ускорение фигуры, а  - угол между
вектором
- угол между
вектором  и
отрезком МА (рис.14).
и
отрезком МА (рис.14).
Таким образом, ускорение любой точки М плоской фигуры геометрически
складывается из ускорения какой-нибудь
другой точки А,
принятой за полюс, и ускорения, которое точка М получает при вращении фигуры вокруг этого полюса. Модуль и
направление ускорения  , находятся построением соответствующего параллелограмма
(рис.23).
, находятся построением соответствующего параллелограмма
(рис.23).
Однако
вычисление  с
помощью параллелограмма, изображенного на рис.23, усложняет расчет, так как
предварительно надо будет находить значение угла
с
помощью параллелограмма, изображенного на рис.23, усложняет расчет, так как
предварительно надо будет находить значение угла  ,
а затем - угла между векторами
,
а затем - угла между векторами  и
и  , Поэтому
при решении задач удобнее вектор заменять его касательной
, Поэтому
при решении задач удобнее вектор заменять его касательной  и
нормальной
и
нормальной  составляющими и представить в виде
составляющими и представить в виде
 .
.
При этом вектор  направлен
перпендикулярно АМ в сторону
вращения, если оно ускоренное, и против вращения, если оно замедленное; вектор
направлен
перпендикулярно АМ в сторону
вращения, если оно ускоренное, и против вращения, если оно замедленное; вектор  всегда
направлен от точки М к полюсу А (рис.15). Численно же
всегда
направлен от точки М к полюсу А (рис.15). Численно же
 .
.
Если полюс А движется не
прямолинейно, то его ускорение можно тоже представить как сумму касательной  и нормальной
и нормальной  составляющих,
тогда
составляющих,
тогда
 .
.
Рис.14 Рис.15
Наконец, когда точка М движется криволинейно и ее траектория известна, то  можно заменить суммой
можно заменить суммой  .
.
Решение задач на определение ускорения
Ускорение любой точки плоской фигуры в данный момент времени можно найти, если известны: 1)
векторы скорости и
ускорения какой-нибудь
точки А этой
фигуры в данный момент; 2) траектория какой-нибудь другой точки В фигуры. В ряде случаев вместо
траектории второй точки фигуры достаточно знать положение мгновенного центра
скоростей.
Тело (или механизм) при решении задач надо изображать
в том положении, для которого требуется определить ускорение соответствующей
точки. Расчет начинается с определения по данным задачи скорости и ускорения
точки, принимаемой за полюс.
План решения (если заданы скорость и ускорение одной
точки плоской фигуры и направления скорости и ускорения другой точки фигуры):
1) Находим мгновенный центр скоростей, восставляя
перпендикуляры к скоростям двух точек плоской фигуры.
2) Определяем мгновенную угловую скорость фигуры.
3) Определяем центростремительное ускорение точки
вокруг полюса, приравнивая нулю сумму проекций всех слагаемых ускорений на ось,
перпендикулярную к известному направлению ускорения.
4) Находим модуль вращательного ускорения, приравнивая
нулю сумму проекций всех слагаемых ускорений на ось, перпендикулярную к известному
направлению ускорения.
5) Определяем мгновенное угловое ускорение плоской
фигуры по найденному вращательному ускорению.
6) Находим ускорение точки плоской фигуры при помощи
формулы распределения ускорений.
При решении задач можно применять «теорему о проекциях
векторов ускорений двух точек абсолютно твердого тела»:
«Проекции векторов ускорений двух
точек абсолютно твердого тела, которое совершает плоскопараллельное движение,
на прямую, повернутую относительно прямой, проходящей через эти две точки, в плоскости
движения этого тела на угол
 в
сторону углового ускорения, равны».
в
сторону углового ускорения, равны».
Эту теорему удобно применять, если известны ускорения
только двух точек абсолютно твердого тела как по
модулю, так и по направлению, известны только направления векторов ускорений
других точек этого тела (геометрические размеры тела не известны), не известны и –
соответственно проекции векторов угловой скорости и углового ускорения этого тела на ось, перпендикулярную плоскости
движения, не известны скорости точек этого тела.
Известны еще 3 способа определения ускорений точек
плоской фигуры:
1) Способ основан на дифференцировании дважды по
времени законов плоскопараллельного движения абсолютно твердого тела.
2) Способ основан на использовании мгновенного центра
ускорений абсолютно твердого тела (о мгновенном центре ускорений абсолютно
твердого тела будет рассказано ниже).
3) Способ основан на использовании плана ускорений
абсолютно твердого тела.
Пример 8. Диск
катится без скольжения по прямой. Центр его С имеет скорость  и ускорение
и ускорение  (рис. 16).
Найдем ускорение точки А.
(рис. 16).
Найдем ускорение точки А.
Рис.16
Решение. Угловую
скорость находим с помощью мгновенного центра скоростей:

Угловое ускорение при таком движении можно найти как
производную от угловой скорости. Имея в виду, что  , а точка С движется по прямой, получим
, а точка С движется по прямой, получим

Если С – полюс, то  , где
, где
 .
.
Величину
ускорения найдём с помощью проекций на оси х и у:

Тогда  .
.
Ускорение мгновенного центра скоростей  ,
,
где  .
.
И, так как  , ускорение
, ускорение  и
и  .
.
Таким
образом, ускорение мгновенного
центра скоростей не равно нулю.
Пример 9. Вернёмся к примеру 5 (рис. 17).
Рис.17
Решение. Найдём
ускорение точки А, полагая  т.е.
т.е. 
Имеем:
 , (1)
, (1)
Где  , но
направление вектора
, но
направление вектора  неизвестно,
неизвестно и угловое ускорение .
неизвестно,
неизвестно и угловое ускорение .
Предположим,
что вектор направлен
перпендикулярно АВ, влево.
Ускорение , конечно, направлено по траектории прямолинейного
движения точки А,
предположим вниз. Спроектируем векторное равенство (1) на оси х и у,
получим:
 и
и  .
.
Из второго уравнения сразу находим ускорение точки А
Положительное значение
 указывает на
то, что направление вектора выбрано
правильно.
указывает на
то, что направление вектора выбрано
правильно.
Из первого уравнения
можно найти ускорение  и угловое
ускорение
и угловое
ускорение  (направления и также угаданы верно).
(направления и также угаданы верно).
Мгновенный центр ускорений.
При непоступательном движении плоской фигуры у нее в
каждый момент времени имеется точка Q, ускорение которой равно нулю. Эта точка называется
мгновенным центром ускорений. Определяется положение центра Q, если известны ускорение какой-нибудь
точки А
фигуры и величины и , следующим путем:
1) находим значение угла , из формулы  ;
;
2) от точки А под углом , к вектору проводим
прямую АЕ (рис.18);
при
этом прямая АЕ должна быть отклонена от в сторону вращения фигуры, если вращение является
ускоренным, и против вращения, если оно является замедленным, т. е. в сторону
направления углового ускорения ;
3) откладываем вдоль линии АЕ отрезок AQ, равный

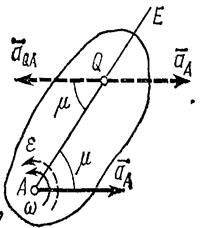
Рис.18
Построенная таким путем точка Q и будет мгновенным центром ускорений. В самом деле, известно что
 ,
,
где численно  . Подставляя сюда значение AQ находим, что
. Подставляя сюда значение AQ находим, что  . Кроме того, вектор
. Кроме того, вектор  должен
образовывать с линией AQ угол , следовательно, вектор параллелен , но направлен в противоположную сторону. Поэтому
должен
образовывать с линией AQ угол , следовательно, вектор параллелен , но направлен в противоположную сторону. Поэтому  и
и  .
.
Если точку Q
выбрать за полюс, то так как , ускорение любой точки М тела, будет

При этом численно

Следовательно, ускорения точек плоской фигуры
определяются в данный момент времени так, как если бы движение фигуры, было
вращением вокруг мгновенного центра ускорений Q. При этом

т.е. ускорения точек плоской фигуры пропорциональны их
расстояниям от мгновенного центра ускорений. Картина распределения ускорений
точек плоской фигуры в данный момент времени показана на рис.19.
Следует иметь в виду, что положения мгновенного центра
скоростей Р
и мгновенного центра ускорений Q в данный момент времени не совпадают. Например, если
колесо катится по прямолинейному рельсу (см. рис.20), причем скорость его
центра С постоянна ( ), то мгновенный центр скоростей находится в точке Р (
), то мгновенный центр скоростей находится в точке Р ( ), но при этом, как было показано
), но при этом, как было показано  ; следовательно, точка Р не является одновременно мгновенным центром ускорений.
; следовательно, точка Р не является одновременно мгновенным центром ускорений.
Рис.19 Рис.20
Мгновенный центр ускорений в этом случае находится,
очевидно, в точке С,
так как она движется равномерно и прямолинейно и  . Центры скоростей и ускорений совпадают тогда, когда
фигура (тело) вращается вокруг неподвижной оси.
. Центры скоростей и ускорений совпадают тогда, когда
фигура (тело) вращается вокруг неподвижной оси.
Понятием о мгновенном центре ускорений
удобно пользоваться при решении некоторых задач.
Вопросы для
самопроверки
- Какое движение твердого тела называется плоским? Приведите
примеры звеньев механизмов, совершающих плоское движение.
- Из каких простых движений складывается плоское
движение твердого тела?
- К изучению какой фигуры сводится кинематика плоского движения?
- Какими уравнениями задается плоское движение?
- Зависит ли поступательное перемещение плоской фигуры и ее вращение от выбора полюса?
- Как
определяется скорость произвольной точки тела при плоском движении?
- Какое
движение твердого тела называется плоскопараллельным?
- Можно ли рассматривать плоскопараллельное движение тела как сложное движение?
- Какими
уравнениями задается плоскопараллельное движение?
- Как по
уравнениям движения плоской фигуры найти скорость полюса и угловую скорость
вращения вокруг полюса?
- Как
определить скорость любой точки плоской фигуры?
- Сформулируйте
теорему о проекциях скоростей двух точек плоской фигуры.
-
Какие способы применяют для определения скоростей точек тела при
плоскопараллельном движении?
- Напишите формулу распределения скоростей точек при плоском движении твердого тела. Покажите все векторы на рисунке.
- Как зависят угловая скорость и угловое ускорение плоской фигуры от выбора полюса?
- Сформулируйте теорему о проекциях скоростей точек плоской фигуры. Дайте графическую (геометрическую) иллюстрацию.
- Что такое мгновенный центр скоростей? Как
определяется величина и направление скорости произвольной точки тела при
известном положении мгновенного центра скоростей и угловой скорости?
- Из каких составляющих складывается ускорение точки
при плоском движении?
- Ускорения двух точек плоской фигуры перпендикулярны прямой, соединяющей эти точки.
Чему в этот момент времени равна угловая скорость фигуры?
- Ускорения двух точек плоской фигуры направлены вдоль прямой, соединяющей эти точки.
Чему в этот момент времени равно угловое ускорение фигуры?
- Скорости двух точек плоской фигуры перпендикулярны прямой, их соединяющей, и равны по величине.
Чему в этот момент времени равна угловая скорость фигуры?
- Как движется плоская фигура, если скорости двух ее точек равны и одинаково направлены.
- Запишите формулы для вычисления касательной и
нормальной составляющих относительного ускорения точки при плоском движении
тела.
- Приведите определение мгновенного центра ускорений.
- При плоском движении тела в некоторый момент времени
оказалось, что его точки А и В отстоят от мгновенного
центра ускорений на расстояниях 5 и 10 см. Чему равен модуль ускорения точки В,
если модуль ускорения точки А равен 3 м/с2?
- Зависят ли поступательное перемещение плоской фигуры
и ее поворот от выбора полюса?
- Как определяется скорость любой точки плоской
фигуры?
- Покажите, что проекции скоростей точек неизменяемого
отрезка на ось, совпадающую с этим отрезком, равны между собой.
- Что представляет собой отрезок, соединяющий две
вершины плана скоростей?
- Какие минимальные данные необходимы для построения
плана скоростей?
- Какую точку плоской фигуры называют называют мгновенным центром
скоростей и каковы основные случаи определения его положения?
- Где находится мгновенный центр скоростей плоской фигуры, совершающей мгновенно поступательное движение?
- Будет ли равно нулю ускорение в точке мгновенного центра скоростей?
- Как направлено ускорение точки М плоской фигуры, если угловая скорость постоянна, а ускорение полюса А направлено по прямой АМ?
- Как направлено ускорение точки М, если плосая фигура совершает мгновенно поступательное движение, а ускорение точки А перпендикулярно прямой АМ?
- Что можно сказать об угловой скорости плоской фигуры, если ускорение точка А равно нулю, а ускорение точки М направлено вдоль прямой АМ?
- Что представляет собой распределение скоростей точек
плоской фигуры в данный момент?
- Какая точка колеса, катящегося без скольжения по неподвижной плоскости, имеет наибольшую скорость?
- Как построить центр поворота плоской фигуры, зная ее
начальное и конечное положения?
- Что представляет собой неподвижная
и подвижная центроиды и что происходит с центроидами при действительном движении плоской фигуры?
- Как
определяется ускорение любой точки плоской фигуры?
- Сформулируйте
теорему об ускорениях точек плоской фигуры.
- Почему проекция ускорения любой точки плоской фигуры
на ось, проходящую через эту точку из полюса, не может быть больше проекции
ускорения полюса на эту ось?
- Какую точку плоской фигуры называют мгновенным
центром ускорений и может ли мгновенный центр
ускорений совпадать с мгновенным центром скоростей?
- Перечислите известные вам способы определения
положения мгновенного центра ускорений?
- Какова картина распределения скоростей точек плоской фигуры, если полюс совпадает с мгновенным центром скоростей?
- Где находится мгновенный центр скоростей подвижной кривой при ее качении без скольжения по неподвижной кривой?
- Что представляет собой картина распределения
ускорений точек плоской фигуры в данный момент времени в трех случаях
а)  ;
;
б)  ;
;
в)  .
.
- Как производят определение ускорений точек и угловых
ускорений звеньев плоского механизма?
- Как определить скорость точки тела, совершающего плоскопараллельное движение?
1) как геометрическую сумму скоростей точки А принятой за полюс вращения и скорости рассматриваемой точки при вращении вокруг точки А;
2) аналогично определению вектора скорости при вращательном движении;
3) как сумма проекций скоростей двух точек, принадлежащих рассматриваемому телу.
- Понятие плоского
движения:
1) когда все точки
тела перемещаются в параллельных плоскостях;
2) вращение вокруг неподвижной оси;
3) когда все точки тела совершают одинаковые
перемещения;
4) сложное движение твердого тела;
5) вращение оси вращения.
email: KarimovI@rambler.ru
Адрес: Россия, 450071, г.Уфа, почтовый ящик 21
Строительная механика Сопротивление материалов
Прикладная механика Детали машин
Теория
машин и механизмов